HyperWatch
Stratospheric tracking for hypersonic missile defense
HyperWatch began as a class project, evolved into a venture-backed company, and became my full-time job for five months. I was the sole engineer.
Explainer: What is HyperWatch and why it matters
The Opportunity
The Problem
China's hypersonic glide vehicles fly above Mach 5 and maneuver unpredictably at low altitudes, evading traditional radar and satellite tracking. Ground-based radars are blocked by Earth's curvature. Space-based systems suffer from latency, poor resolution, and coverage gaps.
The Solution
HyperWatch deploys infrared sensing payloads on long-endurance stratospheric balloons at 20-30 km altitude — above weather and horizon limits, at 1/50th the altitude and 1% the cost of space-based sensors.
Pitch Deck
The Journey
Customer Discovery
HyperWatch started in Stanford's Hacking for Defense, a course focused on intense customer discovery in the defense space. Over 10 weeks, our team of five conducted 107 interviews across the Space Force, MDA, defense primes, and startups. We identified a gap no one was exploiting: the stratosphere.
Watch H4D Final PresentationIncubation & Fundraising
Accepted to Defense Innovation Unit's DISF-C incubator, winning $80k while simultaneously working full-time at Vast Space. After the program, I refined the pitch, built early demos, and raised $250k in venture funding. My cofounder departed at the end of summer, and I continued as sole engineer.
Building
Six flight tests. Two stratospheric launches. One working system.
Development Timeline

Flight Test 1
Raspberry Pi camera payload on tethered balloon. First attempt at computer vision tracking — proved stability was the core challenge.
Watch Video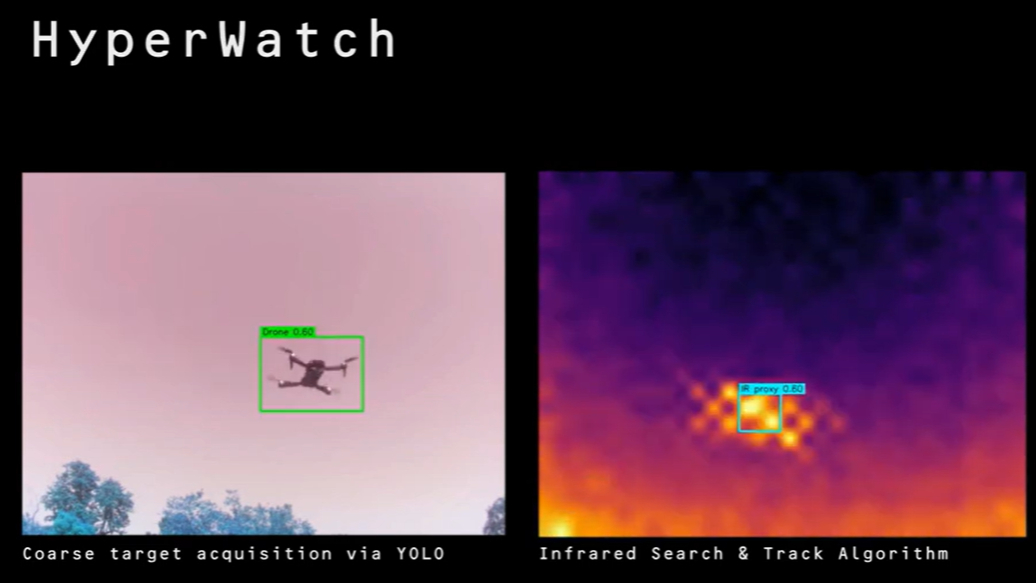
Flight Test 2
Low-cost thermal sensor with camera. Ground-based computer vision validated, but platform stability remained an issue.
Watch VideoFlight Test 3
Mojave desert campaign with model rockets. Upgraded payload hardware. Equipment failed, but captured compelling footage for investors.

Flight Test 4
Upgraded infrared sensor with model rockets. Data collection campaign that validated the tracking algorithm.
Watch VideoStratospheric Launch
Simple payload to 20+ km altitude. Validated the complete launch and recovery process. First attempt failed when commercial GPS cut out at altitude — a hard lesson learned.
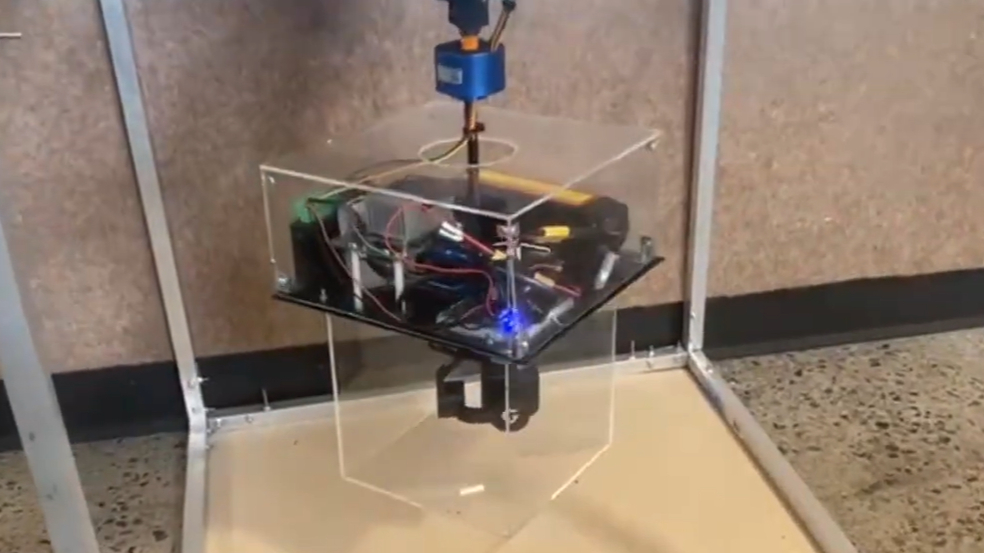
Prototype V5
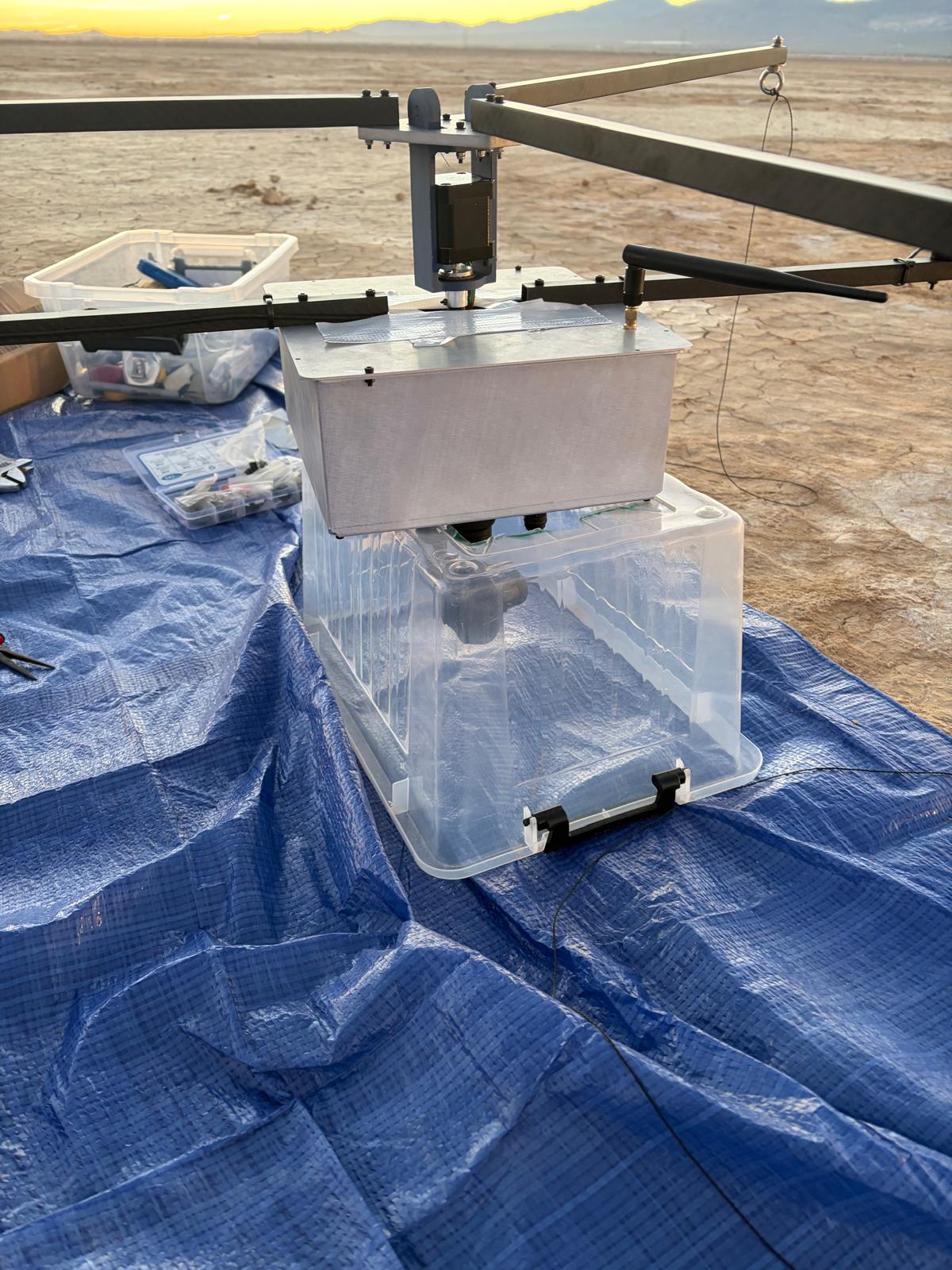
FLIR Hadron thermal camera with gimbal in clear enclosure. Rapid build for Aerostar partnership meeting and Founders Inc demo day.
Watch Video
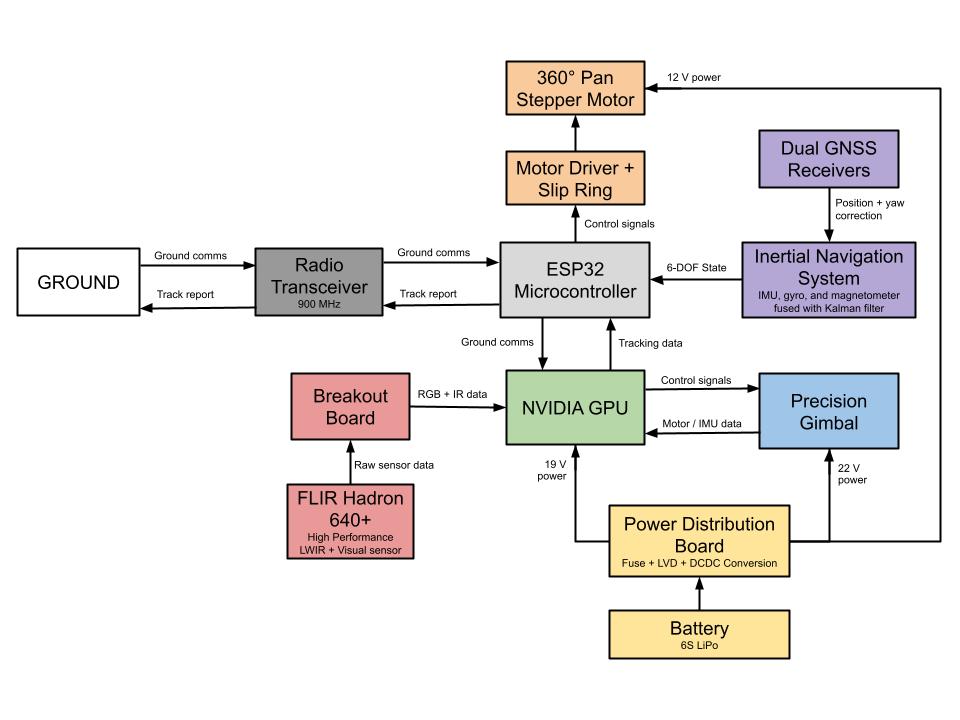
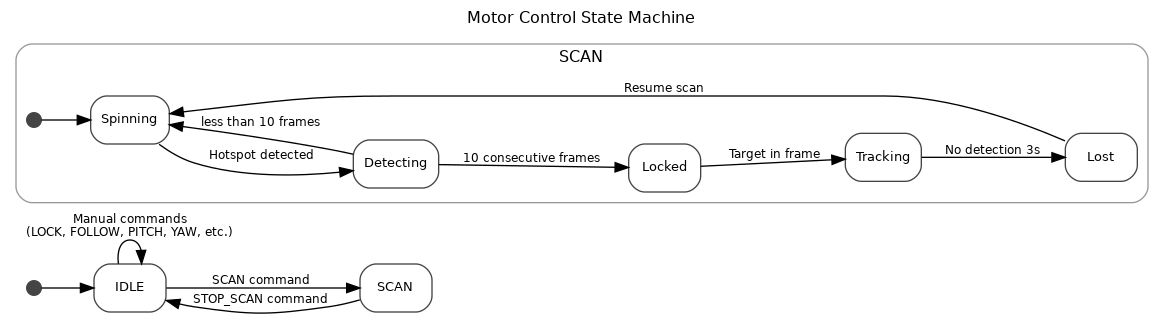
Final System
Complete integrated system: FLIR Hadron, gimbal, custom PCB, full ROS 2 autonomy stack. Achieved 165-meter thermal track on target drone.
Watch VideoThe Final System
IRST Tracking Demo
165-meter thermal track on target drone
By The Numbers
Outcome
I pursued partnerships with Airbus and Aerostar to bid on an MDA contract for high-altitude infrared tracking. That opportunity didn't materialize due to factors outside our control.
After evaluating the path forward — classification barriers, defense procurement timelines, and competitive dynamics — I made the decision to wind down the company and return capital to investors.
What I Walked Away With
- End-to-end experience building a defense hardware startup from concept to field-validated prototype
- Deep understanding of DoD customer discovery and defense procurement
- Technical expertise in autonomous tracking systems, embedded software, and flight hardware
- A system that actually worked
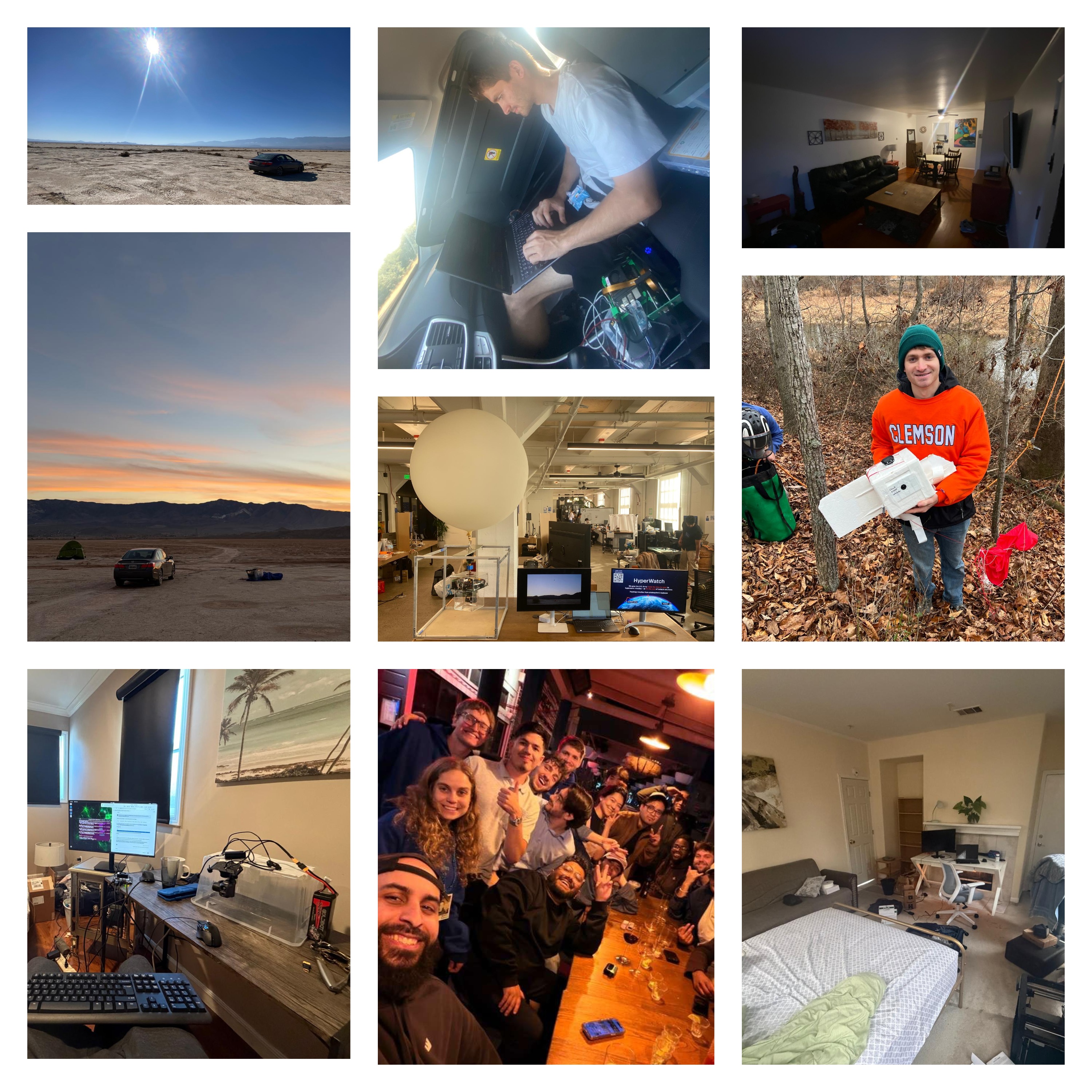
Where It Was Built
Dorm rooms, garages, deserts, and everything in between.